1、%访问并可视化点云消息中的数据。
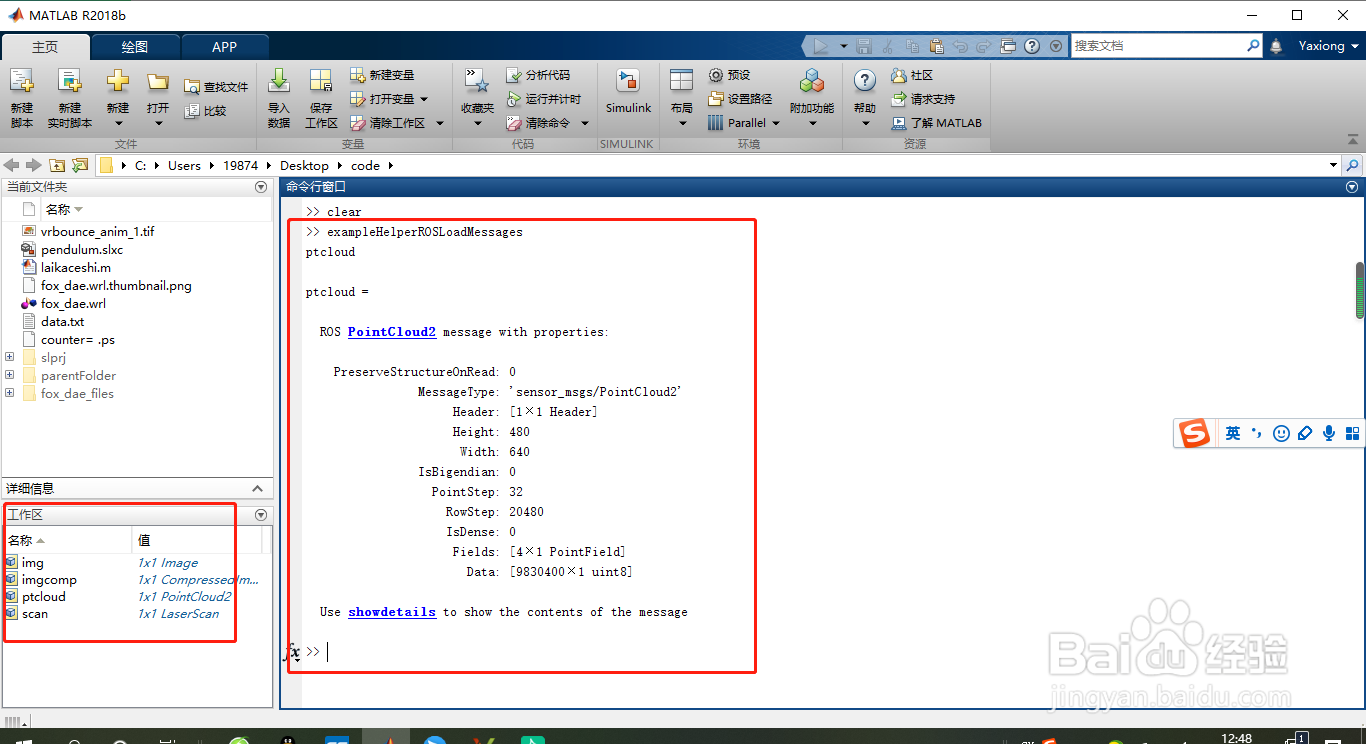
%创建示例ROS消息并检查点云映像。ptcloud是一个示例ROSPointCloud2消息对象。
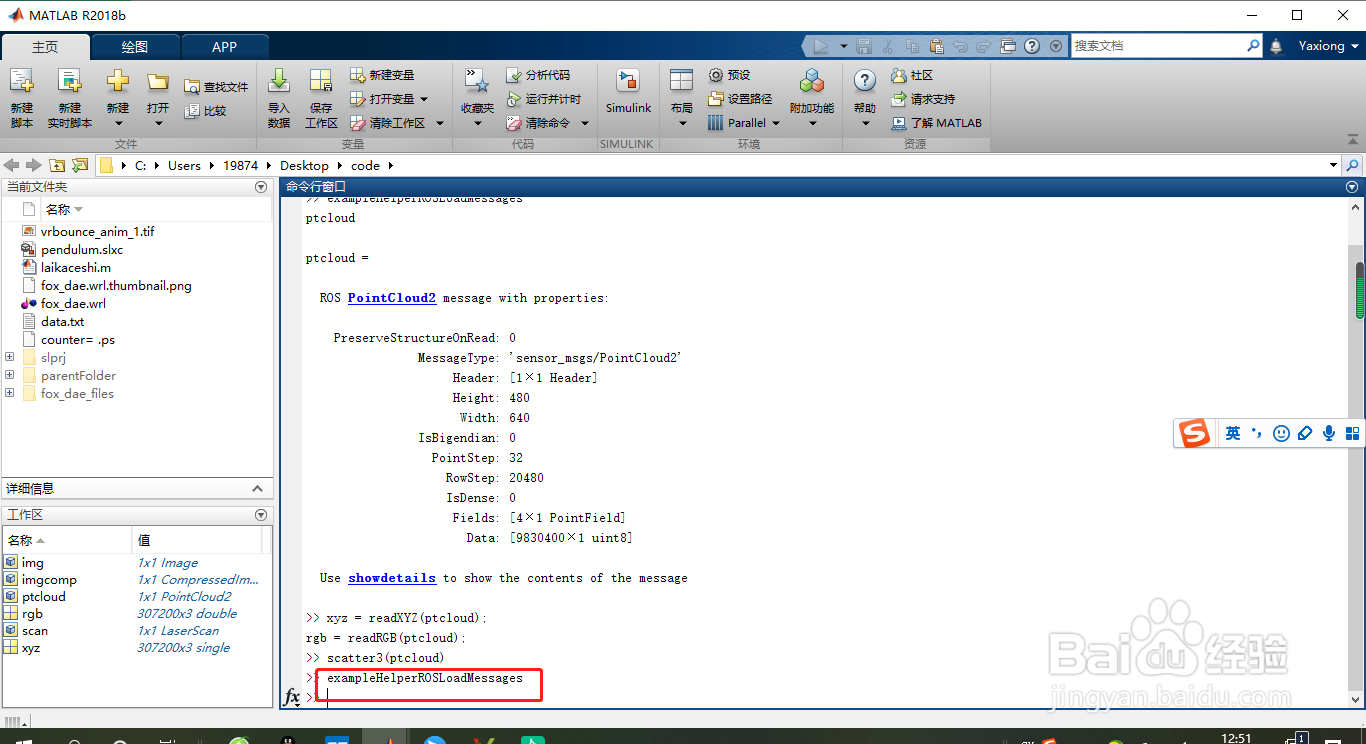
命令行键入:
exampleHelperROSLoadMessages
ptcloud
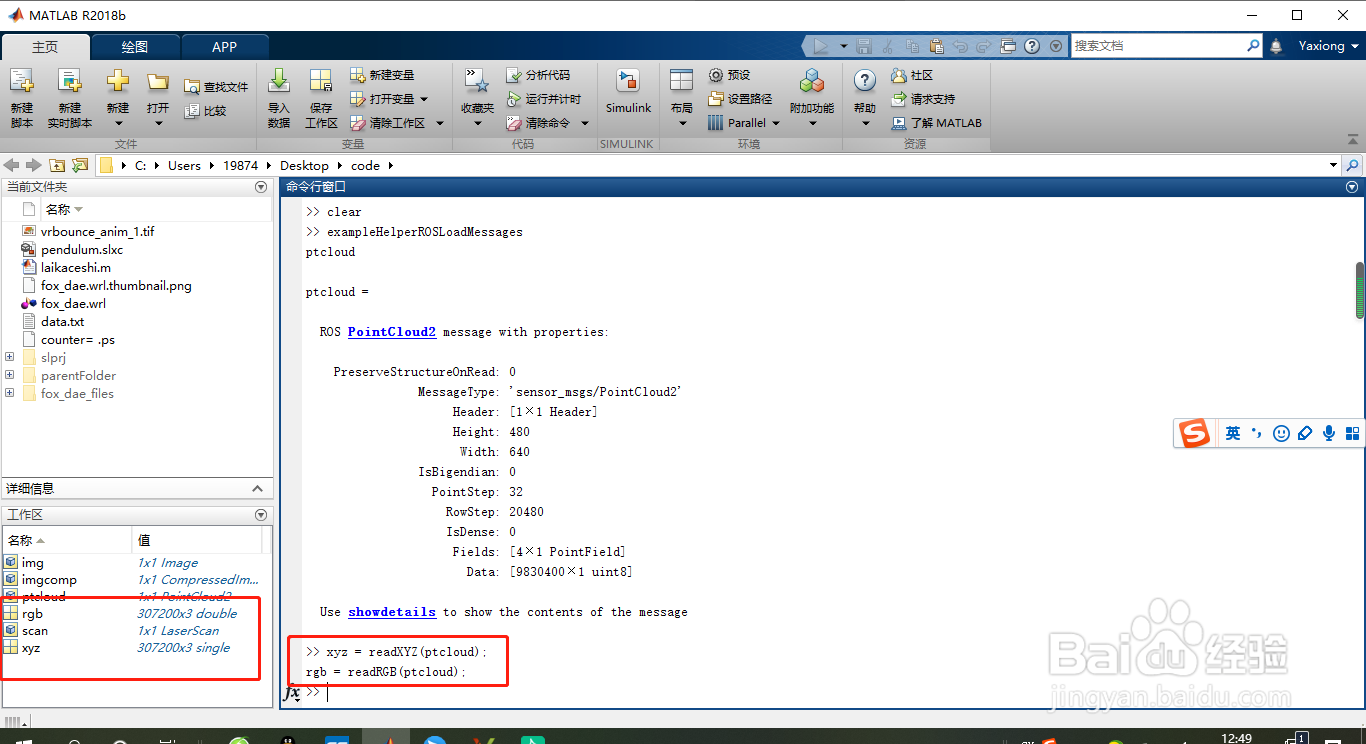
2、%使用readXYZ和readRGB从点云获取RGB信息和xyz坐标。
命令行键入:
xyz = readXYZ(ptcloud);
rgb = readRGB(ptcloud);
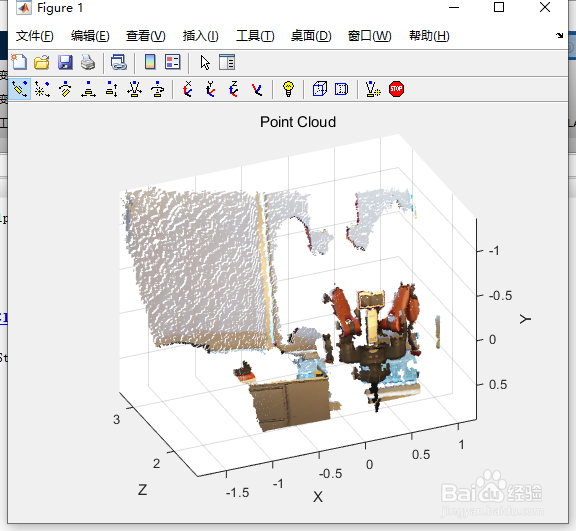
3、%使用scatter3在图中显示点云。
命令行键入:
scatter3(ptcloud)
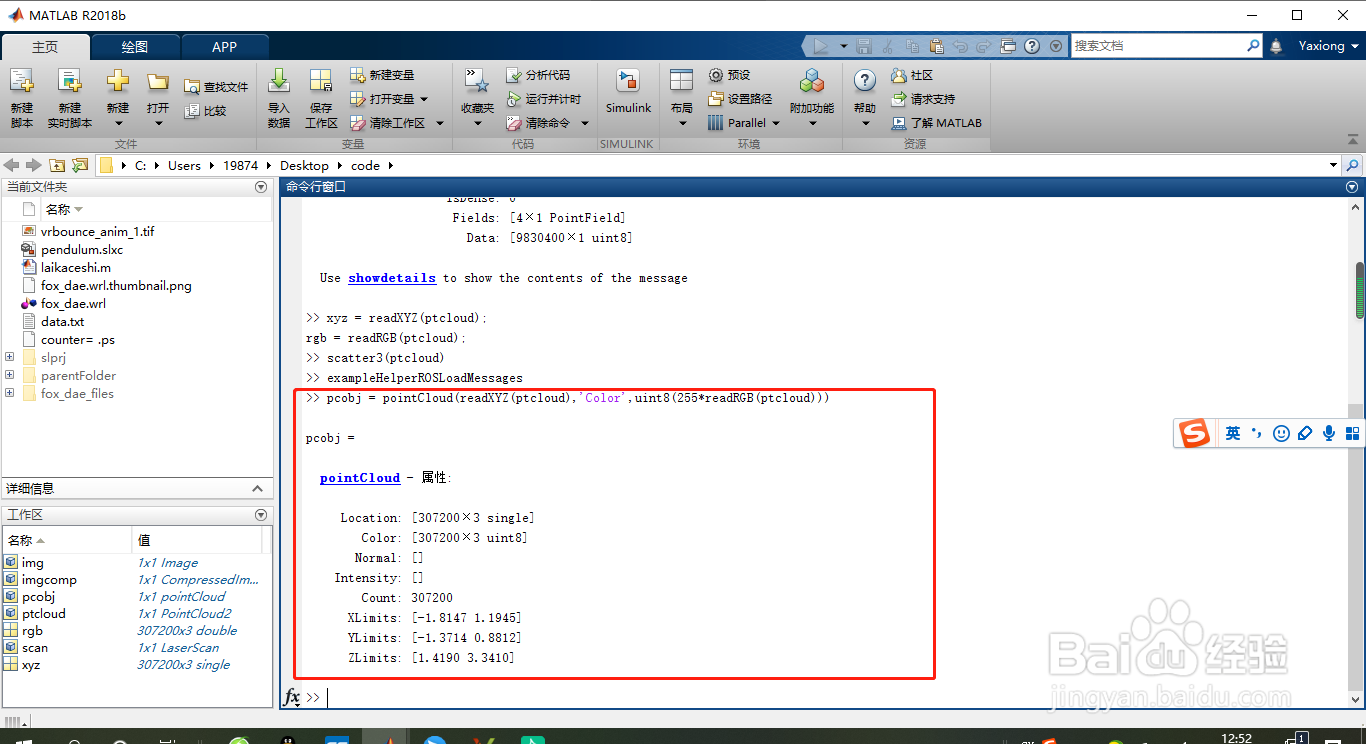
4、%使用点云消息创建点云对象
%将机器人系统工具箱点云消息转换为计算机视觉系统工具箱点云对象。
%加载示例消息。
命令行键入:exampleHelperROSLoadMessages
5、%将ptcloud消息转换为pointCloud对象。
明令行键入:
pcobj = pointCloud(readXYZ(ptcloud),'Color',uint8(255*readRGB(ptcloud)))