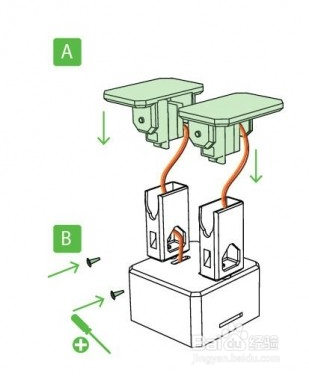
1、组装头部与腿部
把腿对准舵机的正中心,并保证双腿可以旋转90度,用小螺丝固定。


2、组装腿部与脚部
注意舵机的连线,把线穿过头部的预留的空槽。组装完成后用螺丝固定。

3、头部安装
先安装超声波传感器,这样Otto的眼睛就好了。
然后放置Arduino控制板和USB连接器,USB的接口位置要正确,然后用螺丝固定。
你也可以安装电池电池盒,正极连Arduino板,负极接地。

4、电子连线
准备面包板跳线和蜂鸣器。按照下图顺序进行连接。确保所有部分正确连接。

5、上传代码
1. 下载安装Arduino software IDE
2. 下载附件:OTTO_smooth_criminal.zip
3. 复制附件中的Oscillatorlibraries 文件至Arduinolibrary文件夹或任何你安装的文件路径
4. 用USB线连接Otto,上传代码(OTTO_smooth_criminal.ino)。

6、至此,机器人就做好啦

