1、上一期我们主要了解了机器人抓取工件的校准方法,接下来我们详细的了解一下校准机器人和工件的相对位置的方法
在模拟环境中进行工件校准前,需要我们先将真实环境中机器人和工件的相对位置测量出来,测量的方法是将机器人移动到工件的某一个点,然后将示教器上的值记录下来,需要测量三个点,注:这三个点的测量不要在一条直线上。
点击工具栏上的工件校准
2、需要注意的是 上一期我们选择的坐标系是法兰坐标系

3、上一期我们主要了解了机器人抓取工件的校准方法,选择的坐标系是基坐标系
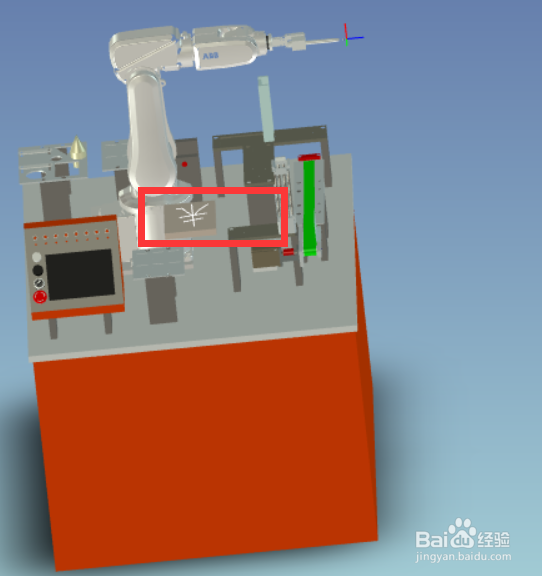
接下来以一个写字的案例为例,“未”字,最初导入的机器人和工件的相对位置如图所示
4、在模拟环境的工件上拾取三个点,如图所示:
5、在模拟环境中拾取三个点之后,接下来我们要将真实的值填入到上图右侧的界面

6、填入真实值之后,直接点击对齐,模拟环境和真实环境中的机器人和工件的相对位置保持一致。对齐效果如图所示:

7、到此,模拟环境中机器人和工件的相对位置与真实环境中的保持一致,接下来设计轨迹,仿真,后置即可,稍后的内容我们下期接着讲解
